Project Info
Project Description
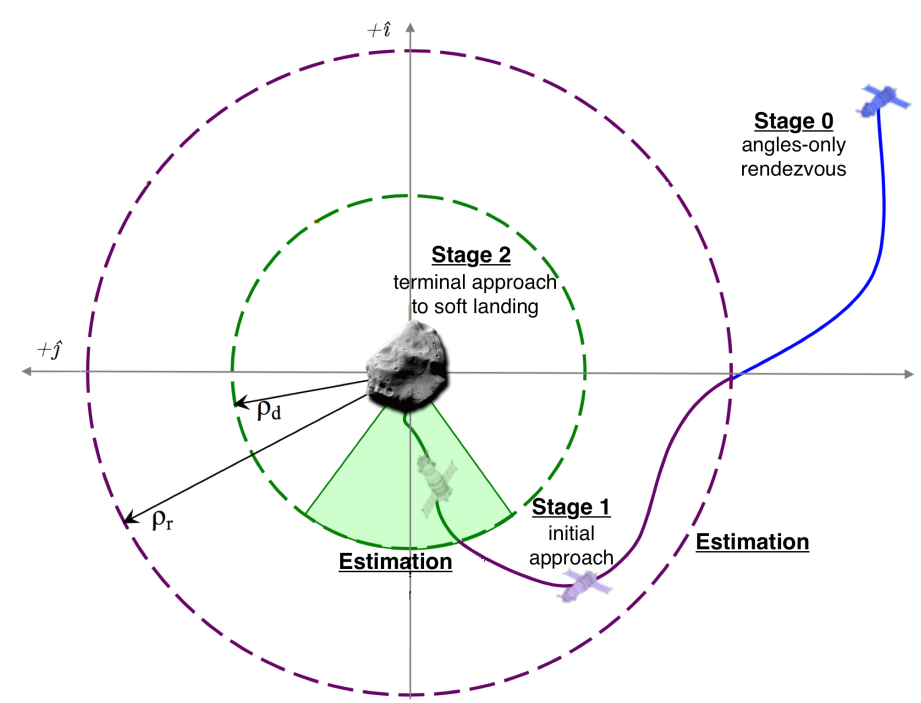
There are a number of multi-satellite architectures that require proximity operations. These include on-orbit servicing, satellite assembly, satellite repurposing, and active debris removal. Such missions require at least two objects to interact in proximity: the Chaser satellite and the Target object. The docking of a Chaser to a Target requires accurate estimation of the Target’s time-varying state as well as efficient utilization of fuel during the approach trajectory. Additionally, Chaser computational limitations constrain the complexity of the trajectory generation method. MIT’s Relative Operations for Autonomous Maneuvers (ROAM) is formulating onboard, autonomous relative navigation estimation, trajectory, and control algorithms for close proximity maneuvers and subsequent maneuvering of the Chaser and Target.